Explicación detallada del rango dinámico en cámaras digitales
¿Por qué unas cámaras tienen mayor rango dinámico que otras? Te lo explicamos de una forma sencilla y te damos las claves para aprovechar al máximo tu cámara.
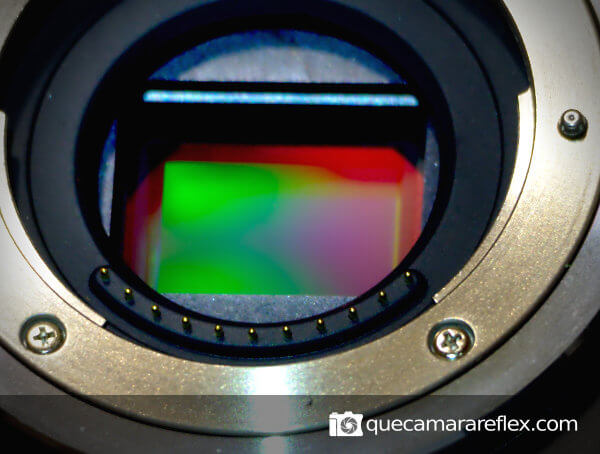
El sensor de las cámaras digitales
El rango dinámico en cámaras digitales viene limitado básicamente por el sensor. Vamos a tomar como referencia un sensor CMOS típico, aunque sería equivalente para otras tecnologías.
Un sensor está formado por millones de celdas fotosensibles.
Cada celda tiene una determinada superficie de captación que convierte fotones en electrones. En función de la tecnología, materiales, etc. cada sensor tiene una determinada eficiencia de conversión. Es decir, hay una parte de la luz incidente que no genera electrones, es absorbida o reflejada por el material.
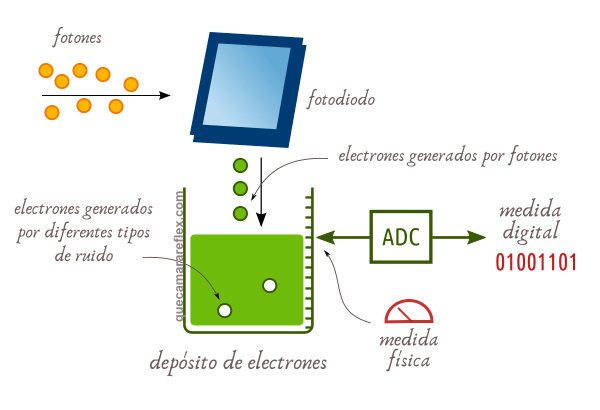
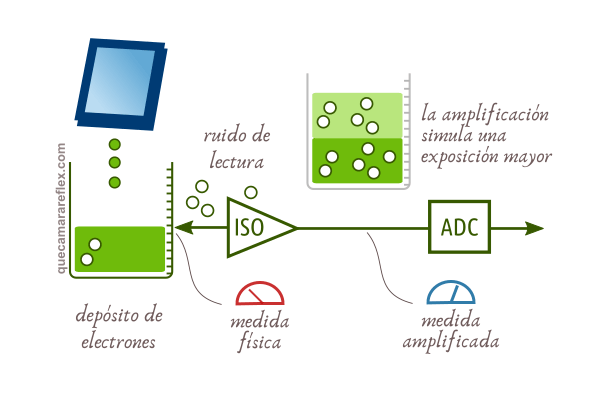
Durante el proceso de exposición de la cámara (el tiempo que permanece abierto el obturador) los electrones se van acumulando en un depósito asociado a cada celda.
La capacidad máxima de dicho depósito se denomina capacidad de pozo lleno (FWC -Full Well Capacity) y se mide en número de electrones. Cuando el depósito de electrones se llena a máxima capacidad correspondería con una zona muy brillante de la imagen, justo cuando empezamos a quemar las luces.
Si sigue llegando más luz a esa celda todos los electrones adicionales se pierden porque el depósito no admite más electrones, entraría en saturación.
Una vez se ha completado el tiempo de exposición para esa toma (se cierra el obturador) se procede a medir la cantidad de electrones acumulados en cada celda.
La medida física es un valor analógico (voltaje en el caso de los sensores CMOS) y se convierte en un valor digital mediante el ADC (analog to digital converter).
Por ejemplo, si usamos un ADC de 8 bits, el valor digital sería un número entre 0 y 255. El cero correspondería con el voltaje 0 (negro - ningún electrón) y el 255 correspondería con el voltaje máximo del depósito (blanco puro)
Relación de contraste ideal de un sensor
A partir de lo que hemos visto anteriormente, podemos tomar como relación de contraste el valor máximo (una celda completamente llena) con respecto al valor mínimo medible o valor mínimo de señal, que sería 1.
Vamos a suponer un sensor cuyos depósitos tengan una capacidad de 500 electrones cada uno. Es decir, el valor de FWC sería 500 y correspondería con el pixel más brillante posible de esa escena. El valor mínimo que puede captar otra celda sería 1 electrón. ¿Cuántos pasos de luz hay en esa relación de contraste?
Para entenderlo visualmente:
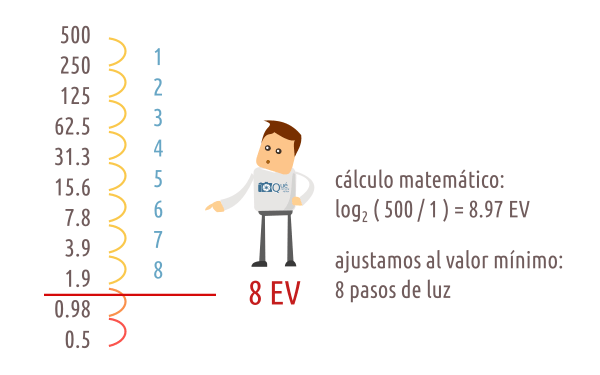
Como no puede haber mitades de electrón, o tercios de electrón, etc. a partir de unos 8 EV se perdería toda la información de las partes más oscuras de la escena.
Los sensores reales suelen tener capacidades de pozo lleno por encima de los 20.000 electrones, lo que daría relaciones de contraste teóricas superiores a los 14 EV
Vamos al siguiente paso de la cadena, el conversor analógico digital (ADC) que muestrea el valor que almacena el depósito y le asigna un valor digital.
El conversor analógico digital (ADC)
El ADC toma a su entrada un voltaje analógico (puede tomar cualquier valor intermedio entre un máximo y un mínimo, aunque en última instancia son también valores cuantizados porque la unidad mínima sería cada fotón / electrón) y lo convierte en un número, en un valor digital.
Por ejemplo, imagina que a la entrada mide voltajes en un rango entre 0 y 1V (voltios)
Un valor de entrada podría ser por ejemplo 0.4213456V, mientras que otra celda podría estar dando un valor de 0.723172V
El ADC mapea esos valores a un número entero en un determinado rango, por ejemplo entre 0 y 255 (256 valores).
Este mapeo implica que se produce un redondeo de los decimales, por ejemplo dos valores de voltaje diferentes pero similares 0.4213V y 0.4275V podrían quedar mapeados al mismo valor entero de salida.
Cuanto mayor sea el rango de salida del conversor, menor será ese error de redondeo. El rango de salida del conversor se corresponde directamente con su número de bits:
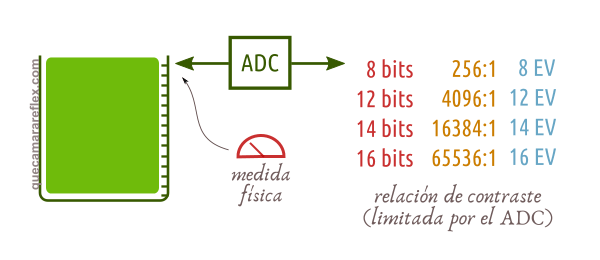
El cálculo de la relación de contraste máxima teórica del conversor es muy sencillo porque el número de bits con el que se codifica el valor se corresponde directamente con el rango dinámico: los números digitales se construyen como potencias de 2, y el rango dinámico se calcula como logaritmo en base 2.
Rango dinámico: capacidad de pozo lleno vs ADC
El cuello de botella para determinar el valor máximo teórico de la relación de contraste puede estar tanto en el valor de FWC de cada celda como en el número de bits del ADC.
Por ejemplo, si el rango dinámico de cada celda del sensor es 8EV, dará igual que el ADC tenga un rango de 14 EV.
Para que tengas una referencia vamos a poner algunos ejemplos de cámaras reales:
-
Sony a7S - FWC: 150.000 electrones / ADC: 14 bits
-
Nikon D810 - FWC: 78.000 electrones / ADC: 14 bits
-
Canon 5D Mark III - FWC: 64.000 electrones / ADC: 14 bits
-
Nikon D3400 - FWC: 35.000 electrones / ADC: 12 bits
-
Panasonic GH5 - FWC: 32.000 electrones / ADC: 12 bits
-
GoPro Hero5 Black - FWC: 6.200 electrones / ADC: 14 bits
-
Samsung Galaxy S6 Edge - FWC: 4.500 electrones / ADC: 10 bits
Más información en photonstophotos.net
En las cámaras actuales ninguno de esos parámetros haría de cuello de botella, ya que el rango dinámico real estaría limitado sobre todo por el nivel de ruido.
Rango dinámico real de un sensor
Como era de esperar, en el mundo real las cosas son un poco más complejas.
Por una parte, para el límite superior hay que tener en cuenta que cerca de la zona de saturación del depósito el comportamiento del mismo deja de ser lineal, y esto normalmente no es bueno.
Lo que suele hacer el fabricante del sensor es considerar sólo la parte con comportamiento más lineal y calibrar el ADC para que cubra sólo ese rango de valores. Por decirlo de alguna forma, se marca como depósito lleno un poco antes de que esté lleno físicamente. Y ese valor máximo se calibra con el máximo valor que proporciona el ADC.
Si el valor de FWC no es el cuello de botella, como ocurre con la mayoría de sensores actuales de cámaras réflex / mirrorless y compactas avanzadas, entonces se suele tomar como referencia el valor máximo que proporciona el ADC. Por ejemplo para sensores de 14 bits tomaríamos el valor 16383.
Ahora vamos con el valor mínimo, que idealmente sería 1. La mínima señal detectable por una celda: por ejemplo 1 electrón o el valor 1 (RAW) a la salida del ADC según la escala de referencia que tomemos.
Sin embargo aquí entra en juego el ruido.
Como ya vimos cuando hablamos de los sensores digitales, en el depósito de cada celda vamos a encontrar electrones que no han sido generados por fotones, por lo tanto no representan la información de la escena, no forman parte de la señal útil, son ruido.
Si en una celda encontramos 1 electrón generado por la luz y 10 electrones generados internamente debido al ruido, eso no puede ser considerado información útil, no aporta nada con respecto a la escena que estamos intentando fotografiar.
Para valorar la calidad de la información en un entorno con ruido se utiliza normalmente la relación señal a ruido, SNR (Signal to Noise Ratio).
Antes de comentar sobre el ruido electrónico, vamos a hacer unos cálculos rápidos tomando como referencia estas dos cámaras:
-
Sony a7S - FWC: 150.000 electrones / ADC: 14 bits
-
GoPro Hero5 Black - FWC: 6.200 electrones / ADC: 14 bits
Puedes ver por ejemplo que la GoPro Hero5 está limitada por su FWC a unos 12 EV de rango dinámico teórico. Por lo tanto su ADC desaprovecha 2 pasos de información.
También vamos a estimar rápidamente cómo se hace el mapeo en el ADC.
En la a7S:
- 150.000 / 16384 nos da aproximadamente 9. Es decir, cada valor RAW o valor digital se construye a partir de unos 9 electrones del depósito.
En la GoPro Hero5:
-
6200 / 4096 nos da aproximadamente 1.5. Es decir, cada valor digital se construye a partir de 1 electrón aproximadamente. Hemos tenido en cuenta que se utilizan sólo 12 bits, no los 14 que podría usar su ADC.
Intuitivamente nos podemos hacer una idea de que la Sony a7S está utilizando más información de entrada para generar la información digital de la imagen.
Fuentes de ruido en un sensor digital
Si tenemos en cuenta todo el proceso hasta llegar a la salida del ADC encontramos fundamentalmente:
-
Ruido fotónico (photon shot noise)
-
Ruido térmico (dark current / thermal noise)
-
Ruido de lectura (read noise) que básicamente es ruido térmico en la electrónica que se encarga de leer la cantidad de electrones almacenada en cada celda
Ruido fotónico
El ruido fotónico está asociado a la propia naturaleza de la luz, no depende del sensor ni su tecnología.
Imagina que tienes una intensidad de luz fija, constante y uniforme iluminando al sensor. Todas y cada una de las celdas deberían recibir la misma cantidad de luz, pero a esas escalas tan pequeñas las celdas ven en realidad paquetes de energía (fotones) que van llegando en sucesión.
Aunque en promedio todas las celdas reciben una cantidad similar, una celda en concreto puede recibir algunos fotones más que la media, otra celda algunos fotones menos, etc.
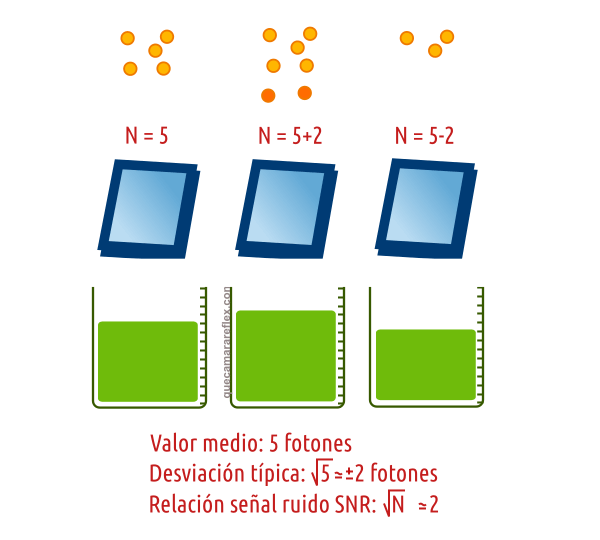
Esa diferencia de cada celda con respecto al promedio es lo que se conoce como ruido fotónico.
El ruido fotónico crece a medida que llegan más fotones, pero la relación no es lineal. Dada una cantidad media de fotones, el ruido fotónico que recoge una celda individual estará en el orden (desviación típica) de la raíz cuadrada de esa cantidad media global.
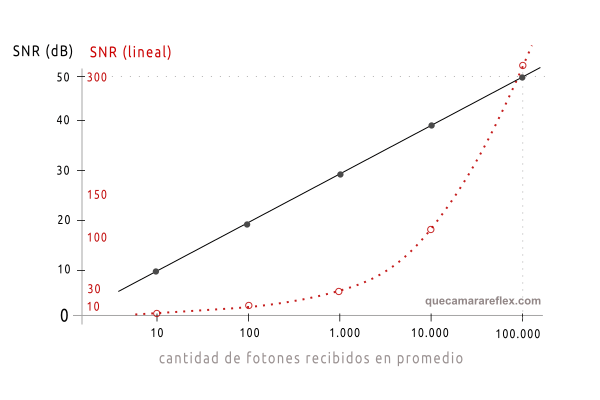
Esto quiere decir que la relación señal a ruido que tiene que ver con el ruido fotónico crece exponencialmente a medida que llegan más fotones.
Una celda que recoja muchos fotones tendrá siempre una mejor relación señal ruido que una celda que recoja pocos fotones.
Ruido térmico (thermal noise / dark current)
El ruido térmico está asociado a cualquier material conductor cuya temperatura esté por encima del cero absoluto.
En el caso de los sensores, el ruido térmico (dark current) hace referencia a la cantidad de electrones generados por efecto térmico en las celdas. Los electrones generados son almacenados en el depósito y lógicamente son indistinguibles de los electrones generados por fotones.
Estos electrones se generan debido a la temperatura, incluso en ausencia total de fotones.
El ruido térmico aumenta con la temperatura y con el tiempo de exposición:
- A mayor tiempo de exposición más electrones (generados por efecto térmico) pasarán al depósito, es aproximadamente una relación lineal
- Un tiempo de exposición grande implica también que el sensor se calienta más y aparecerá más ruido térmico
- Fotografiar a temperaturas altas (verano) implica un nivel de ruido térmico más elevado que fotografiando a bajas temperaturas (invierno). El ruido térmico se incrementa exponencialmente con la temperatura.
En los sensores modernos el ruido térmico suele ser muy bajo para tiempos de exposición normales. Sólo tiene influencia en situaciones con tiempos de exposición altos o condiciones extremas de temperatura.
Ruido de lectura (read noise)
El ruido de lectura es básicamente ruido térmico, pero generado por los circuitos electrónicos asociados al proceso de lectura del valor del depósito de electrones.
Es decir, justo al terminar la exposición de una imagen, en el depósito de electrones de una celda tendremos:
- Electrones generados por fotones de la escena
- Variación debida al ruido fotónico
- Electrones generados por la temperatura del sensor
Ahora hay que medir la cantidad de electrones del depósito (normalmente el voltaje) y pasar ese valor a la entrada del ADC.
Ese proceso implica la adición de ruido electrónico adicional.
El ruido de lectura está influido por la temperatura del sensor, pero no es acumulativo, es decir, no es proporcional al tiempo de exposición.
En general, el ruido de lectura suele ser el más significativo en las zonas de sombra de la imagen (celdas con poca señal)
Rango dinámico y relación señal a ruido
Traduciendo al mundo de la fotografía: una imagen con una SNR muy baja equivale a una imagen con mucho ruido, muy granulada.
Lo que interesa siempre es tener un SNR lo más alto posible.
Y por otra parte también podemos poner un límite inferior al SNR, por debajo del cual consideramos que la calidad de la información es demasiado pobre y deja de sernos útil.
Este límite inferior para el SNR es totalmente subjetivo y depende de lo que cada uno considera ruido aceptable.
En muchos casos se toma como referencia un SNR = 0 dB (en escala logarítmica, que es como se suele expresar la relación señal a ruido).
Esto implica que se toma como valor mínimo la señal (número de electrones generados por fotones) que iguala a la cantidad de ruido (electrones generados internamente por efectos térmicos, etc.). Se usa habitualmente como referencia el ruido de lectura (read noise) justo a la entrada del ADC.
Rango dinámico técnico o de ingeniería (0 dB)
¿Con ese valor de SNR=0 dB se tendría una calidad de imagen aceptable en esos píxeles de las zonas más oscuras de la imagen?
No, evidentemente esas zonas tendrían mucho ruido y no se distinguirían bien el detalle, la textura, ni el color de esas zonas.
Pero es una forma objetiva de tener un valor de SNR y por tanto un valor de rango dinámico teórico o de base para comparar.
A este rango dinámico se le conoce como Rango Dinámico de Ingeniería (Engineering Dynamic Range)
Rango dinámico fotográfico
¿Cuál sería un valor de relación señal ruido más práctico desde el punto de vista de un fotógrafo?
Probablemente a partir de 12 a 20 dB de relación señal a ruido tendríamos una calidad aceptable. Para que te hagas una idea:
-
6dB se corresponden con el doble de señal con respecto al ruido (1 EV o paso de luz si lo expresamos en logaritmo en base 2)
-
12dB correspondería con una señal 4 veces mayor que el ruido (2 EV)
-
20dB correspondería con una señal 10 veces mayor que el ruido (unos 3 EV)
-
26dB se correspondería un una señal 20 veces mayor que el ruido (unos 4 EV)
Cuando se tienen en cuenta estos criterios se habla de Rango Dinámico Fotográfico (PDR - photographic dynamic range)
Ese límite inferior para la relación señal a ruido es totalmente subjetivo.
Normalmente 6dB es un límite muy bajo y quedaría por debajo de los criterios de calidad habituales.
Habrá personas que con un SNR de 12dB ya consideren que la calidad es aceptable para el uso que van a dar a la imagen.
Y habrá personas para las que su límite aceptable esté por encima de los 26dB
Rango Dinámico desde el punto de vista de un fotógrafo
El rango dinámico mide la diferencia de luminosidad entre la zona más brillante y la zona más oscura de la escena que la cámara puede captar, de forma que la imagen resultante mantenga en esas zonas (tanto las más brillantes como las más oscuras) detalles, texturas y colores reconocibles de la escena original.
Desde este punto de vista, y teniendo en cuenta que hay un alto grado de subjetividad que depende de cada persona, probablemente el criterio de 20 dB (3 pasos) o incluso 26dB (4 pasos) de relación señal ruido mínima sería el más apropiado.
Se puede estimar el rango dinámico fotográfico a partir del rango dinámico de ingeniería, que es el que suele aparecer publicado en páginas especializadas, DxOMark por ejemplo:
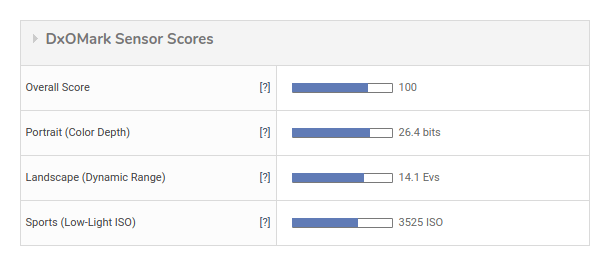
Para el caso del rango dinámico (Landscape / Dynamic range):
Dynamic range corresponds to the ratio between the highest brightness a camera can capture (saturation) and the lowest brightness it can capture (which is typically when noise becomes more important than the signal — that is, a signal-to-noise ratio below 0 dB). A value of 12 EV is excellent, with differences below 0.5 EV usually not noticeable.
A partir de unos 12 EV de rango dinámico ya se considera un comportamiento excelente para una cámara. Y las diferencias por debajo de medio paso (0.5 EV) son indistinguibles.
Si tomamos un criterio de calidad de imagen de 26dB (4 EV) para el SNR mínimo, podremos estimar el rango dinámico útil que nos dará esa cámara del ejemplo restando el margen de SNR. Por ejemplo:
14.1 EV - 4 EV = 10 pasos de rango dinámico usable para una calidad de imagen buena / aceptable
Una cámara con un rango dinámico de ingeniería de unos 12 EV (que ya se considera un rendimiento excelente) proporcionaría un rango dinámico fotográfico de unos 8 o 9 EV.
Rango Dinámico vs ISO
Como regla general el rango dinámico de la cámara disminuye a medida que subimos los valores de ISO.
Intuitivamente la explicación es sencilla.
Cuando subimos un paso de ISO estamos utilizando la misma cantidad de información, el mismo número de fotones que llegan al sensor.
Ese paso extra de exposición implica que en el rango de las altas luces (suponiendo que hubiera altas luces en la escena) estaríamos saturando y desperdiciando información.
No nos podemos inventar información de donde no la hay. Subir ISO equivale a desplazar el histograma hacia la derecha de forma ‘artificial’. En la parte de las sombras (zona izquierda) no entra más información, mientras que en la parte de las luces (zona derecha) perdemos información o al menos la posibilidad de recoger esa información.
Hay casos especiales que dependen del comportamiento de cada sensor, si se utilizan perfiles especiales (por ejemplo en vídeo), etc.
Pero en general el rango dinámico máximo del sensor se conseguiría con el ISO base de la cámara.
Aprovechar el rango dinámico de una cámara
Casi nunca vamos a aprovechar el rango dinámico máximo de una cámara.
Cómo conseguiríamos aprovechar el rango dinámico de nuestra cámara en una escena normal:
-
Poner la cámara en su ISO base (ISO 100 en muchas cámaras)
-
Configurar la cámara para que guarde las imágenes en formato RAW
-
Tenemos que exponer para maximizar la cantidad de luz que pueda recoger el sensor en esa escena. Esta técnica se conoce como derecheo del histograma y consiste en sobreexponer hasta que el histograma esté en límite de quemar las altas luces.
-
Si la propia escena tiene un rango dinámico superior al de la cámara tendremos que decidir si exponemos en las sombras (quemando las altas luces) o si exponemos en las altas luces, por ejemplo justo en el límite antes de quemarlas o a veces tendremos que sacrificar un poco las altas luces para que el rango dinámico de la cámara cubra las zonas de mayor interés de la escena.
-
Luego en el proceso de revelado del fichero RAW ajustamos la exposición global si es necesario, para recuperar la exposición correcta de la escena.
-
Podemos aplicar técnicas de mapeo tonal para comprimir el rango dinámico que ha obtenido la cámara y ajustarlo al rango dinámico del medio donde vamos a reproducir la imagen: monitor, papel fotográfico, etc.
El límite va a estar normalmente en el nivel de ruido de las zonas oscuras de la imagen.
El riesgo que se corre al usar la técnica de derecheo de histograma es que podemos estar quemando detalles en las altas luces sin saberlo.
El histograma que muestra la cámara está basado en una versión JPEG de la imagen que estamos capturando, aunque trabajemos en formato RAW. Esa imagen JPEG ya lleva un procesado interno, incluyendo mapeo tonal, contraste, saturación, etc.
Por lo tanto, a partir del histograma de la cámara no podemos estar seguros al 100%, habría que dejar un pequeño margen.
Si tu cámara no te permite usar formato RAW o en el caso de vídeo (con perfiles normales), lo más recomendable es realizar una exposición correcta. Muchas veces tendremos que decidir igualmente si exponemos para las sombras o para las luces, pero vale la pena sobreexponer para luego recuperar en edición ya que la imagen JPEG ya tiene un rango dinámico más reducido y no nos da tanto margen en edición.
Para vídeo, si la cámara dispone de perfiles logarítmicos (S-Log, C-Log, etc.), dichos perfiles permiten optimizar el rango dinámico global sacrificando un poco de detalle en las altas luces.
Cuando se utilizan perfiles logarítmicos hay que tener bastante experiencia para exponer correctamente y además es necesario un procesado bastante intenso en edición. La señal de vídeo que obtenemos directamente de la cámara es muy plana, apenas sin contraste y saturación.
Técnicas HDR (high dynamic range)
En fotografía, y si la escena y la situación lo permiten, se pueden utilizar técnicas HDR para expandir el rango dinámico de la cámara.
Estas técnicas consisten básicamente en tomar una serie de fotografías de la misma escena, normalmente se necesita trípode para que la cámara permanezca totalmente estable.
Cada una de las fotos se toma con una exposición diferente, por ejemplo la primera subexpuesta 1 paso, la segunda con una exposición adecuada para esa escena y la tercera sobreexpuesta un paso.
Se pueden tomar series más amplias, con un ahorquillado mayor (2 o 3 pasos por encima y por debajo de la exposición normal)
Luego, con un programa específico para HDR o con un módulo del programa de revelado o edición, se cargan todas las fotos y el programa se encarga de procesarlas y mezclarlas, de tal forma que cada zona de la imagen conservará la exposición más adecuada y el global de la imagen tendrá un rango dinámico extendido.
En muchos casos el programa se encarga de hacer el mapeo tonal, para comprimir todo ese rango dinámico en un rango más estrecho compatible con las pantallas o con el papel fotográfico.
En otros casos el mapeo tonal lo podemos hacer de forma manual, ya sobre la imagen HDR, para tener más control sobre el resultado final.
Algunos móviles utilizan técnicas HDR muy avanzadas: graban una secuencia de imágenes de una escena, básicamente un trozo de vídeo, y mediante software realizan un procesado muy complejo que les permite alinear todas las imágenes (incluso cuando las tomamos a mano alzada) y hacer un apilado de las mismas para ajustar la exposición. El apilado tiene además el efecto de reducir el ruido aleatorio.
Las técnicas HDR sólo se pueden utilizar normalmente en escenas estáticas. Si la escena incluye objetos en movimiento aparecerán movidos en la secuencia y se crearán artefactos no deseados al apilar y mezclar las imágenes.
Rango dinámico de una cámara o sensor. Resumen
-
El rango dinámico teórico depende del valor máximo (electrones) que puede almacenar cada celda del sensor, lo que se conoce como capacidad de pozo lleno o FWC (full well capacity). También está limitado por el número de bits del conversor analógico digital ADC.
-
En la mayoría de sensores modernos podemos tomar el valor máximo en unidades RAW (es decir, el valor máximo obtenido a partir de los bits de codificación del ADC, por ejemplo 16383 en sensores de 14 bits)
-
El valor mínimo de señal que puede detectar una celda depende del criterio que utilicemos con respecto al ruido.
-
Si usamos el criterio de SNR=0 dB obtendremos un rango dinámico técnico o de ingeniería
-
Si usamos un punto de vista de ‘fotógrafo’ tenemos que establecer un criterio de SNR más restrictivo. El rango dinámico fotográfico (PDR) es normalmente de 2 a 4 pasos inferior al rango dinámico de ingeniería
Enlaces y referencias
- Night Vision, Mark Green
- Vision under mesopic and scotopic illumination, Andrew J Zele / Dingcai Cao
- Dynamic Range of the Human Eye, wolfcrow.com
- Preparando la impresión: el arte de la fotografía, Joan Roca
- Charla de Enrique Pacheco sobre vídeo HDR
- How to Measure Full Well Capacity (1), Albert Theuwissen
- Qué es el rango dinámico, Guillermo Luijk
- Read noise vs Shot noise - What is the difference and when does it matter?, Gretchen Alper
- Funcionamiento del sensor de una cámara digital
- Qué son los pasos de luz en fotografía (f-stops)
- Rango dinámico explicado de una forma sencilla