Fuentes de ruido en los sensores de imagen y valor ISO
En este artículo vamos a intentar entender qué es el ruido en las cámaras digitales y cómo afecta a la calidad de la imagen. También veremos un poco el efecto que tiene subir el valor de ISO en diferentes situaciones.
Sensor de imagen CMOS
Vamos a tomar como referencia un sensor de imagen CMOS típico.
Ten en cuenta que vamos a hacer simplificaciones y generalizaciones.
Cada modelo de sensor puede ser ligeramente diferente. Y todo lo que tiene que ver con el estudio del ruido es bastante complejo y difícil de modelar matemáticamente.
En este artículo vamos a tratar de entender el funcionamiento básico y explicar el comportamiento del sensor (un sensor típico de una cámara de fotos genérica) en determinadas situaciones.
¿A qué nos referimos cuando hablamos de ruido?
En un mundo ideal la señal generada por cada celda del sensor sería perfectamente proporcional a la cantidad de luz de la escena.
Es decir, el número de electrones generado por la celda sería proporcional al número de fotones que recibe dicha celda.
En el mundo real las cosas son un poco diferentes.
Cada celda va a generar electrones adicionales (por su cuenta, podríamos decir) que no tienen que ver con la luz que llega de la escena.
La propia luz tiene un comportamiento estadístico y por lo tanto lleva asociada una variabilidad.
Podríamos pensar que sobre la señal ideal (electrones que se corresponderían con la escena real) hay una especie de variabilidad estadística que ‘contamina’ el resultado final.
Esa contaminación es lo que llamamos ruido electrónico (o ruido digital, pero es un término que no me gusta tanto)
Relación señal a ruido, SNR
Cuando hablamos de señal nos estamos refiriendo a información (información útil).
Por ejemplo, en una foto, la información útil es la imagen que representa de una forma fiel la escena.
Sobre esa señal hemos visto que siempre hay una cierta contaminación de ruido.
Desde el punto de vista práctico lo que interesa es que la información sea mucho más grande que el ruido.
Esa relación (SNR, Signal to Noise Ratio) da idea de la calidad de imagen.
Una relación señal a ruido muy grande implica que vamos a obtener una imagen muy ‘pura’, en la que va a ser muy difícil apreciar el ruido.
El ruido en una imagen se visualiza como una especie de granulado, falta de homogeneidad en superficies que deberían ser totalmente homogéneas, pérdida de detalle, artefactos de color…
Una relación señal a ruido muy baja se traduciría en una imagen muy granulada, con falta de homogeneidad muy apreciable en tonos y en color.
A medida que baja la relación señal a ruido puede llegar un momento en que es muy difícil incluso reconocer la información original.
En una imagen con mucho ruido se pierden los detalles de la escena, las texturas, etc.
Fuentes de ruido
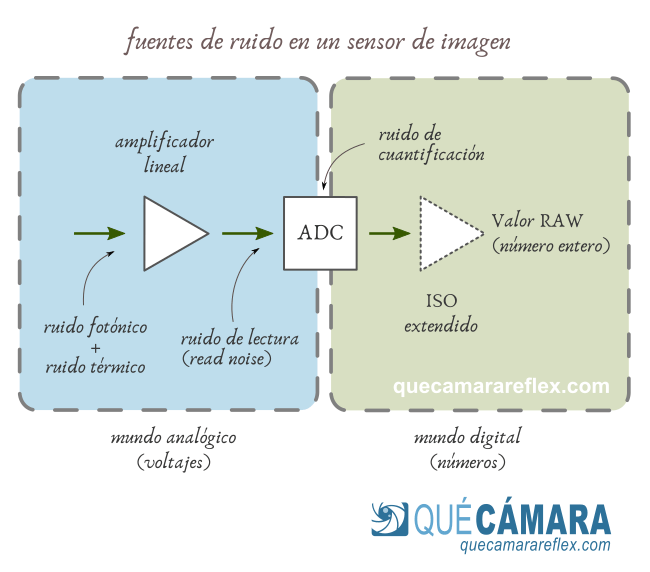
Las fuentes de ruido afectan a la parte analógica del sensor (tensiones, voltajes, corrientes…)
Una vez que la señal pasa a ser digital deja de haber fuentes de ruido como tales.
Esa señal se procesa de forma matemática y se opera con números enteros: sumas, restas, multiplicaciones, divisiones… (podríamos considerar el redondeo en las operaciones con enteros, pero el efecto es mínimo comparado con las fuentes de ruido físicas)
Por supuesto, en la parte digital podríamos hacer un procesado o tratamiento destructivo, pero en general no tendría relación con lo que conocemos como ruido.
Nos vamos a centrar inicialmente en una cualquiera de las celdas del sensor.
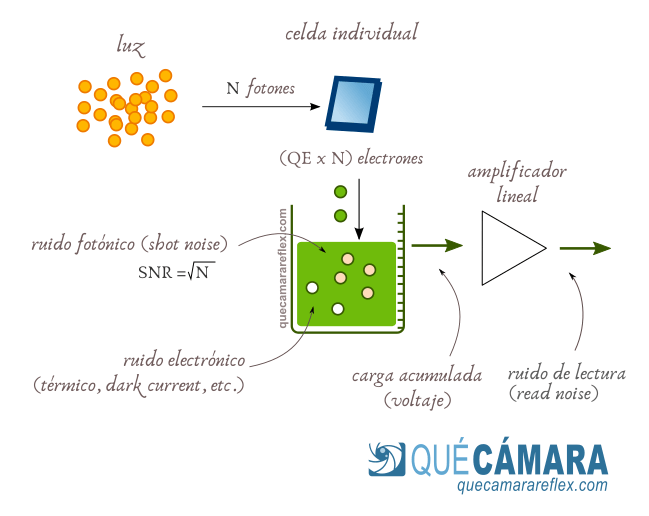
A modo de resumen rápido, el funcionamiento en la celda sería:
-
La celda recibe un determinado número de fotones (exposición: intensidad de luz por el tiempo de exposición)
-
De esos fotones, una parte son convertidos en electrones según la eficiencia cuántica del material fotosensible y de su estructura física El resto de los fotones son absorbidos por el material en forma de calor
-
Los electrones generados a partir de fotones son almacenados en un depósito de la celda (condensador / well capacity)
-
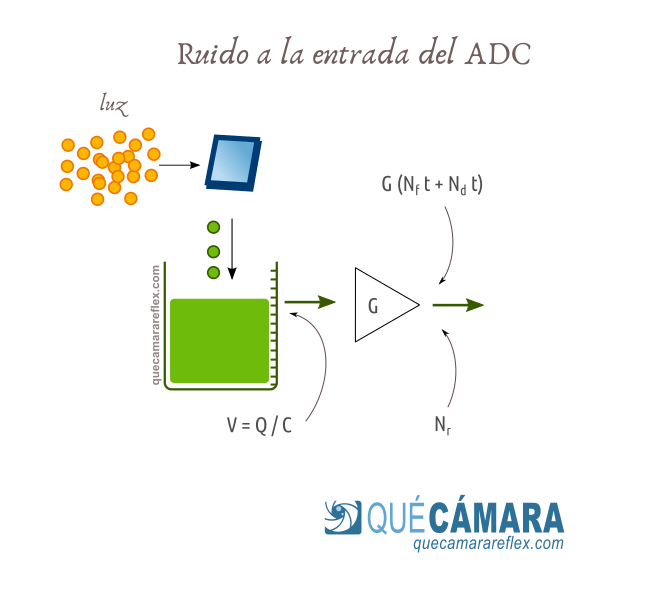
En cada celda habrá un voltaje (tensión) proporcional al número de electrones acumulados La relación entre el voltaje y la carga (electrones) la define la fórmula del condensador: V = Q / C
-
Esa señal analógica pasa a un amplificador lineal (control de ganancia / ISO) La ganancia del amplificador está calibrada para ofrecer la ‘sensibilidad’ adecuada según el estándar ISO
-
La salida del amplificador pasa a un conversor analógico digital (ADC) y a partir de ese momento ya sería un número entero, un valor (valor RAW). Cada unidad de la escala del ADC se suele conocer como ADU (analog-to-digital conversion unit)
Vamos entonces con las fuentes de ruido:
Ruido fotónico
El ruido fotónico está asociado a la propia luz, no depende del sensor ni su tecnología.
Imagina que tienes una intensidad de luz fija, constante y uniforme iluminando al sensor.
Todas y cada una de las celdas deberían recibir la misma cantidad de luz, pero a esas escalas tan pequeñas las celdas ven en realidad paquetes de energía (fotones) que van llegando en sucesión.
Aunque en promedio todas las celdas reciben una cantidad similar, una celda en concreto puede recibir algunos fotones más que la media, otra celda algunos fotones menos, etc.
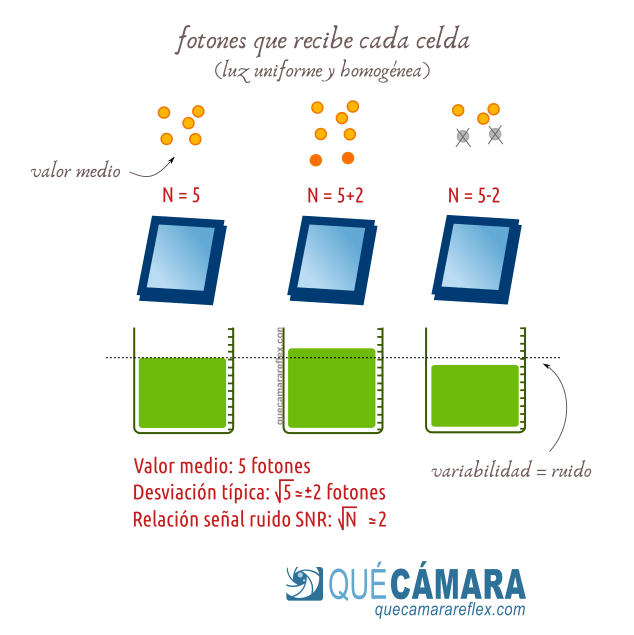
Esa diferencia de cada celda con respecto al promedio es lo que se conoce como ruido fotónico (shot noise) y sigue una distribución estadística de Poisson.
El ruido fotónico crece a medida que llegan más fotones, pero la relación no es lineal. Dada una cantidad media de fotones, el ruido fotónico que recoge una celda individual estará en el orden (desviación típica) de la raíz cuadrada de esa cantidad media global.
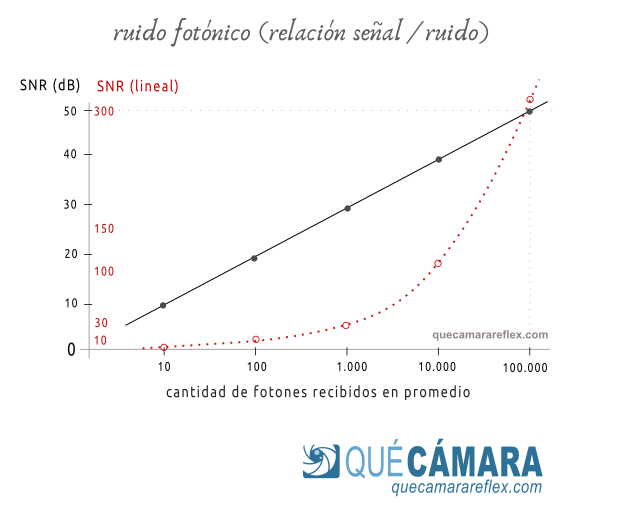
Esto quiere decir que la relación señal a ruido con respecto al ruido fotónico crece exponencialmente a medida que llegan más fotones.
Una celda que recoja muchos fotones tendrá siempre una mejor relación señal ruido que una celda que recoja pocos fotones.
Aquí tienes más información sobre el ruido fotónico (shot noise / photon noise)
Ruido térmico (thermal noise / dark current)
El ruido térmico está asociado a cualquier material conductor cuya temperatura esté por encima del cero absoluto.
En el caso de los sensores, el ruido térmico (dark current) hace referencia a la cantidad de electrones generados por efecto térmico en las celdas.
Los electrones generados son almacenados en el depósito y son indistinguibles de los electrones generados por fotones.
Estos electrones se generan debido a la temperatura, incluso en ausencia total de fotones (de ahí el término de dark current, corriente que se genera en la oscuridad).
El ruido térmico aumenta con la temperatura y con el tiempo de exposición:
-
A mayor tiempo de exposición más electrones (generados por efecto térmico) pasarán al depósito, es aproximadamente una relación lineal
-
Un tiempo de exposición grande implica también que el sensor se calienta más y aparecerá más ruido térmico
-
El ruido térmico se incrementa exponencialmente con la temperatura. Por ejemplo, fotografiar a temperaturas altas (verano) implica un nivel de ruido térmico más elevado que fotografiando a bajas temperaturas (invierno)
En los sensores modernos el ruido térmico suele ser muy bajo para tiempos de exposición normales.
Sólo tiene influencia en situaciones con tiempos de exposición altos, condiciones extremas de temperatura exterior o calentamiento interno excesivo del sensor.
Este ruido térmico sigue también una distribución estadística de Poisson. En inglés lo encontrarás a veces como shot noise en el contexto de la parte electrónica, haciendo referencia a esa distribución, pero no hay que confundir con el ruido fotónico (también denominado shot noise).
El funcionamiento del sensor en sí no suele generar un aumento significativo de su temperatura, pero sí se puede ver afectado por el calentamiento de otros componentes de la cámara. Por ejemplo el procesador suele ser una fuente importante de calor en el interior de una cámara (y además las cámaras de fotos suelen disipar muy mal el calor hacia el exterior).
Puede ocurrir que la temperatura del sensor no sea homogénea (p.e. imagina que el procesador está situado cerca de una parte del sensor). En ese caso la distribución de ruido tampoco será homogénea a lo largo de todo el sensor.
Las celdas con mayor temperatura generarán más ruido que las que están a menor temperatura. Y se creará una especie de patrón de ruido en la imagen final (una parte de la imagen puede tener más ruido que otra parte)
Ruido de lectura (read noise)
El ruido de lectura es el ruido que aparece a la salida del bloque de amplificación, justo a la entrada del ADC.
En algunos sitios se define como read noise el ruido total, incluido el que se arrastraba desde la etapa anterior (antes del amplificador, upstream) más el que se genera en la fase de amplificación (downstream).
Yo prefiero la definición que corresponde únicamente con el ruido térmico que se añade a la salida del amplificador (downstream read noise).
¿Qué hace exactamente el amplificador?
El amplificador lineal adapta el nivel de señal (voltaje) almacenado por la celda durante una exposición.
Esa señal se amplifica para alcanzar un determinado nivel a la entrada del conversor analógico digital (ADC, analog to digital converter).
Este amplificador es básicamente lo que conocemos como ISO.
Cada sensor está calibrado para que su ISO base entre dentro de los márgenes del estándar ISO (Organization for Standardization, estándar ISO 12232:2006)
Es decir, todos los sensores, dadas las mismas condiciones de luz y los mismos parámetros de configuración de la cámara (ISO + apertura + velocidad de obturación) deberían ofrecer una imagen idéntica en cuanto a exposición. En la práctica hay siempre un margen de tolerancia.
Subir ISO consiste básicamente en subir la ganancia del amplificador (luego veremos qué ocurre con los ISOs extendidos y también que algunas cámaras realizan otras operaciones cuando modificamos el ISO).
Volviendo al ruido de lectura…
El ruido de lectura se ‘suma’ a la señal amplificada, que ya incluía las otras fuentes de ruido.
El ruido de lectura está influido por la temperatura del sensor, pero no es acumulativo, es decir, no es proporcional al tiempo de exposición.
Como es un ruido de origen térmico: más temperatura del sensor implica más variabilidad, más ruido de lectura.
Pero en este caso (a diferencia del ruido generado en la celda, dark current) no se acumula en ningún sitio, no depende directamente del tiempo de exposición, aunque el tiempo de exposición prolongado puede elevar la temperatura y con ello el ruido de lectura.
Lo podemos imaginar como la variabilidad instantánea en el momento de medir el valor para hacer la lectura (la conversión de voltaje a número).
Y, también muy importante, el ruido de lectura (definido de esta forma) no se ve afectado por la ganancia del amplificador como ocurre con las otras fuentes de ruido.
La señal en ese punto llega amplificada por un factor G (la ganancia del amplificador que corresponda al valor ISO activo)
Cuanto mayor sea la ganancia mayor será la diferencia de niveles entre la señal y el ruido de lectura.
Aunque pueda parecer anti-intuitivo, subir ISO aumenta la relación señal a ruido con respecto al ruido de lectura.
Ruido de cuantificación
La precisión del conversor depende de su ‘resolución’, del número de bits con el que va a codificar la señal analógica.
Al convertir una señal analógica en una digital se produce un error de redondeo.
Por ejemplo, imagina un ADC de 8 bits (255 niveles diferentes) y vamos a suponer que la señal analógica la normalizamos para que vaya desde 0 voltios hasta 255 voltios (esto no pasa en el sensor, es sólo un ejemplo para visualizar el error de redondeo).
Cuando la señal es 5 voltios el conversor nos da el número entero 5.
Pero cuando la señal es 5.2 voltios, el conversor también nos dará un valor de 5.
Sin embargo, cuando sea 5.7 voltios nos dará un valor de 6.
Hay una pequeña discrepancia entre el valor analógico (con todos sus decimales) y el valor RAW entero. Esa discrepancia es el error de cuantificación.
En los sensores modernos de 12, 14, 16 bits… ese error suele ser muy pequeño. Despreciable con respecto a las otras fuentes de ruido (luego veremos cómo se suman las fuentes de ruido y por qué el efecto de ciertas fuentes puede llegar a ser mínimo)
Otras fuentes de ruido
Puede haber otras fuentes de ruido, que serían más difíciles de modelar o no afectarían a nivel de celda.
Estas fuentes que vamos a comentar tienen que ver con los procesos de fabricación del sensor.
Hot pixels
Los hot pixels propiamente dichos son celdas que (por las tolerancias o defectos de fabricación) tienen una tendencia mayor a que se les filtren electrones de los alrededores.
Con la temperatura aumenta la probabilidad de que se filtren más electrones, como si se desbordara un río y se llenara la celda con electrones que no tienen que ver con los fotones que recibe la parte fotosensible.
Cuando ocurre ese desbordamiento las celdas aparecen como puntos brillantes (normalmente de algún color primario cuando se genera la imagen final a partir de los datos RAW).
Dependiendo de la estructura de cada celda en particular, a veces cuando la temperatura baja la celda vuelve a recuperar su funcionamiento normal.
Por ese motivo suelen aparecer de una forma más visible en fotografías de larga exposición, cuando el sensor aumenta su temperatura.
Aunque muchos de esos hot pixels se deben a los procesos de fabricación del sensor, también pueden aparecer (en todos los sensores aparecen nuevos hot pixels con el tiempo) debido a que la estructura de la celda se pueden dañar por efecto de radiación muy energética (por ejemplo las partículas derivadas de los rayos cósmicos que consiguen llegar a la parte baja de la atmósfera)
Patrón fijo de ruido
Esto de los patrones de ruido ya lo hemos comentado cuando hablamos sobre el ruido térmico (cada zona del sensor con diferente temperatura producirá diferentes niveles de ruido), pero también puede tener otras causas.
La circuitería de un sensor es muy compleja y en algunos diseños puede ocurrir que internamente el sensor de caliente de forma no homogénea.
También puede ocurrir que por otros motivos (tolerancias de fabricación) el ruido térmico sea diferente en una celdas con respecto a otras.
Esa falta de homogeneidad se traduce en un patrón de ruido que puede llegar a ser visible en la imagen final.
En general a este tipo de ruido se le llama FPN (Fixed Pattern Noise)
Suele aparecer como un patrón geométrico repetitivo, con zonas de la imagen en las parece que se acumula más ruido o es más visible.
Sumando ruido
El ruido que aparecerá en la imagen final podríamos imaginarlo como la suma de todas las contribuciones de ruido que se generan en el proceso.
Recuerda que lo que nos interesa normalmente es la relación señal a ruido (SNR)
El nivel absoluto de ruido no suele ser un parámetro importante salvo casos muy concretos.
Cada fuente de ruido lo podemos ver como una cierta variabilidad sobre la señal (que podríamos imaginarla como el valor medio)
Es decir, en una celda puede ocurrir que el ruido A sume electrones y el ruido B también sume.
Pero en otra celda puede ocurrir que el ruido A está ‘restando’ electrones mientras que el ruido B los suma.
Y en otra celda puede ocurrir que ni el ruido A ni el ruido B estén contribuyendo.
Y en cada foto que tomamos puede ser completamente diferente.
Es un proceso aleatorio, estadístico.
Cuando las fuentes de ruido son independientes entre sí (no tienen correlación estadística) podemos imaginar su contribución como vectores ortogonales.
La suma de la contribución de todas las fuentes de ruido es una suma vectorial.
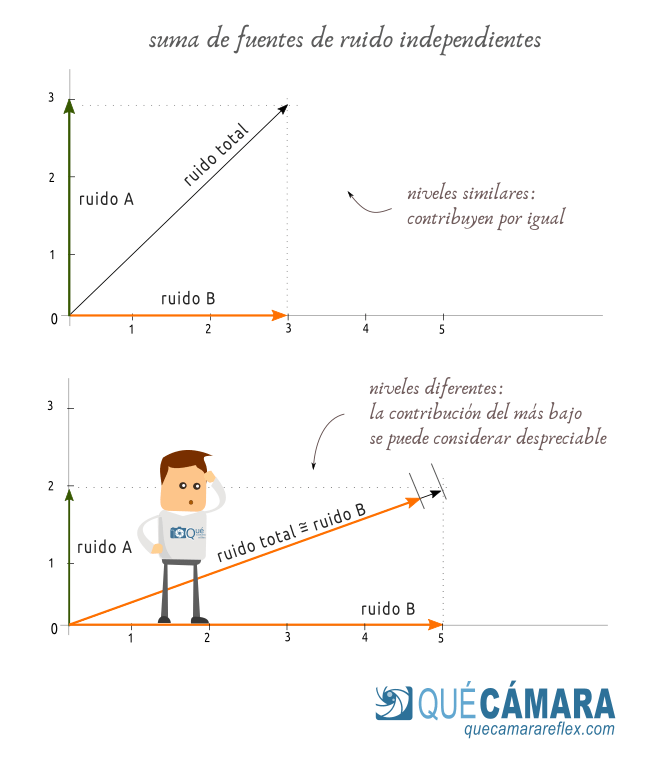
El ruido total es siempre menor que la suma directa de las contribuciones de ruido (aparece la raíz cuadrada que se corresponde con el cálculo de la hipotenusa).
A la hora de sumar y comparar ruido se suelen usar valores RMS. En el caso de los sensores se suele usar como unidad el número de electrones (e- rms). Por ejemplo un nivel de ruido de lectura podría ser 5 e- rms.
Cuando una de las fuentes de ruido es más grande que las demás (su nivel rms) se podría interpretar como que el resultado de las otras fuentes es comparativamente mucho más pequeño.
En realidad todas contribuyen, pero si tomamos la más grande como referencia con respecto al nivel de ruido total, la contribución de las demás se podría decir que es muy pequeña. En muchos casos se puede considerar despreciable.
Por eso, el comportamiento del sensor puede cambiar bastante según el escenario que estemos contemplando.
El comportamiento de un sensor suele estar caracterizado en función del tipo de ruido que es más predominante en cada zona: en función del número de fotones que está recibiendo la celda y las condiciones de funcionamiento (temperatura, ISO, etc).
A partir de un cierto número de fotones el ruido predominante suele ser siempre el ruido fotónico.
Ruido total y efecto del parámetro ISO
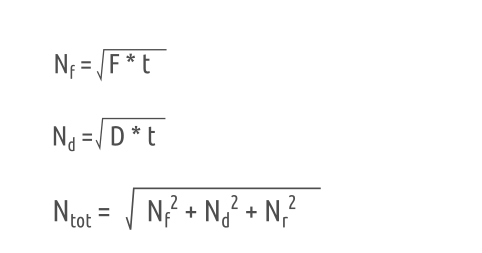
El ruido que genera un sensor típico CMOS antes de aplicar ningún tipo de amplificación (a ISO base podríamos decir) se suele modelar con la siguiente fórmula:
Donde:
-
Nf es el ruido fotónico Es una distribución de Poisson F es el flujo de fotones por unidad de tiempo t es el tiempo de exposición
-
Nd es el ruido térmico (dark current) También se modela como una distribución de Poisson D es el flujo de electrones por unidad de tiempo generados por efecto térmico t es el tiempo de exposición
-
Nr es el ruido de lectura Es un ruido térmico pero no acumulativo. Depende de la temperatura pero no del tiempo de exposición Es la variabilidad en el instante de hacer la medida
-
Ntot es el ruido total Para ganancia unidad (ganancia 1 no tiene por qué coincidir con ISO Base, pero en estos ejemplos lo tomaremos como referencia para que las comparaciones sean más sencillas) Es la suma vectorial de todas las contribuciones de ruido (no están correladas)
Si incluimos la ganancia del amplificador, afectará a las fuentes de ruido que había antes del amplificador (fuentes upstream).
La ganancia afecta a Nf (fotónico) y a Nd (dark current). Es decir, en lugar de Nf quedaría G*Nf y en lugar de Nd quedaría G*Nd.
He sustituido sus expresiones originales para reforzar la idea de que son proporcionales al tiempo de exposición):
(las raíces internas de Nf y Nd desaparecen al elevar al cuadrado, y la ganancia (al cuadrado) la podemos sacar como factor común)
La relación señal a ruido, que es lo que nos interesa, quedaría de esta forma:
Para un sensor modelado de esa forma, aumentar ISO implica aumentar la SNR (mejorar la calidad de imagen), pero aumentar la exposición implica una mejora mucho más rápida de la SNR.
Por ejemplo, en esta gráfica vemos el comportamiento de la SNR para dos escenarios diferentes:
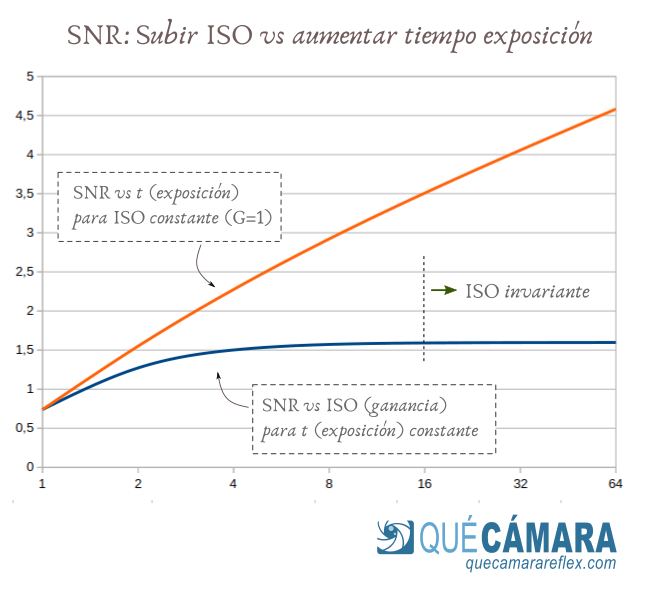
La curva naranja sería el comportamiento de la SNR manteniendo ISO constante y aumentando el tiempo de exposición. En el eje horizontal serían unidades de tiempo y cada salto correspondería con un paso.
La curva azul corresponde con un tiempo de exposición fijo (una exposición real fija, el mismo número de fotones) y lo que aumentamos es la ganancia. En el eje horizontal estaría la ganancia (G) y cada salto correspondería con un paso. En un sensor normal esto correspondería con subir el ISO (100, 200, 400, 800…)
Todos los demás parámetros del modelo se han mantenido constantes: el ruido térmico (dark current), el flujo de fotones por unidad de tiempo y el ruido de lectura.
En general, este modelo simula bastante bien el comportamiento de la mayoría de los sensores CMOS de las cámaras de fotos.
Lo que sacamos de todo esto es que a igualdad de condiciones es mucho más efectivo aumentar el tiempo de exposición.
Que es algo que ya sabíamos y que tiene toda la lógica: la información viene en los fotones. Más fotones: más información.
Pero hay situaciones en las que no tenemos mucha luz ni podemos hacer una exposición larga. En esos casos interesará aumentar ISO para ‘reducir el ruido’ (en realidad para aumentar la relación señal a ruido).
Por ejemplo en fotografía astronómica interesa elegir un ISO que nos dé la mejor SNR posible (ya que normalmente estamos limitados por el tiempo de exposición máximo, incluso si se utilizan sistemas de seguimiento para compensar la rotación de la Tierra).
Cuando tenemos poca luz y necesitamos disparar con una velocidad de obturación muy alta: subir ISO es un compromiso porque precisamente reducir el tiempo de exposición es lo que nos está generando ‘ruido’ (una SNR baja ya de entrada).
Pero en general para un determinado tiempo de exposición, subir ISO mejora la SNR final.
Cuando hablo aquí de tiempo de exposición me refiero a cualquier método que suponga aumentar el número de fotones reales: podemos aumentar el flujo de fotones (mejorar la iluminación de la escena, usar una apertura mayor) o usar un tiempo de exposición mayor. Lo resumimos en el tiempo de exposición porque es un poco el parámetro al que podemos recurrir si todo lo demás nos limita.
Zona de ISO invariante
Aumentar ISO sólo supone una ventaja hasta que alcanzamos la zona de ISO invariante.
Como el ruido de lectura tiene un nivel determinado, la curva de mejora de SNR tiene un techo máximo (converge hacia un determinado SNR máximo que equivaldría a un sensor ideal sin ruido de lectura)
A partir de un cierto valor de ISO, los saltos posteriores ya no tienen apenas influencia en la SNR.
Por ejemplo, imagina que un sensor entra en la zona de ISO invariante a partir de ISO 1600. Si todos los demás parámetros permanecen iguales (tiempo, apertura, luz, etc.) seguir subiendo a ISO 3200 o ISO 6400, etc. ya no me aportaría ninguna ventaja apreciable, la SNR permanecería prácticamente constante.
A los sensores con un ruido de lectura muy bajo se les suele llamar sensores ISO invariantes, porque el techo máximo se alcanza con valores de ISO muy bajos. A partir de ahí, da igual si aplicamos ISO en cámara o si subimos la exposición en el proceso de revelado RAW.
A modo de resumen
En un sensor suele haber varias fuentes de ruido.
Cada tipo de ruido puede ser predominante dependiendo de la situación.
El mejor escenario posible es cuando podemos captar muchos fotones. El número total de fotones es lo que llamamos exposición real, que depende de la iluminación de la escena, la apertura y el tiempo de exposición.
En esas condiciones el ruido predominante es el ruido fotónico (que forma parte de la propia luz, no tiene nada que ver con el sensor)
Dado un tiempo de exposición determinado, subir ISO aumenta la SNR.
El aumento de SNR debido al ISO está limitado, tiene un techo. A partir de un cierto valor entraríamos en la zona de invarianza ISO del sensor.
Aumentar ISO en esas situaciones lo podríamos ver como una forma de exponer a la derecha (ETTR): nos puede limitar también que algunas celdas lleguen a saturación (quemar las altas luces)
En la mayoría de las situaciones cuando usamos una cámara, subir ISO es a costa de bajar los parámetros de exposición real (apertura, tiempo). Por eso, en nuestra experiencia cotidiana subir ISO lo asociamos con más ruido (SNR más pequeña)
Pero el ruido no tiene que ver con el valor de ISO, tiene que ver con la relación entre número de fotones captados y los electrones generados por las diferentes fuentes de ruido. En esas situaciones, subir ISO simplemente hace más visible ese ruido.
En la mayoría de situaciones en que nos veamos forzados a reducir la exposición real (p.e. tiempos de exposición muy cortos para congelar la imagen) es preferible subir el ISO y usar una exposición ‘correcta’. Vamos a conseguir una SNR mejor que disparando en un ISO más bajo (subexponiendo) para luego subir la exposición a partir del fichero RAW.
Dicho de otra forma: no nos tiene que dar miedo subir ISO cuando sea necesario.
¿Se puede eliminar el ruido electrónico?
El ruido (variabilidad) forma parte de la naturaleza y de los procesos físicos. No se puede eliminar.
Lo que se intenta hacer es reducir la contribución de las diferentes fuentes de ruido.
Cómo reducir el ruido fotónico
La única forma de reducir el ruido fotónico es utilizando la mayor cantidad posible de luz, la mayor cantidad posible de fotones.
En una situación normal esto equivale a utilizar objetivos con una gran apertura, aumentar todo lo posible el tiempo de exposición, utilizar luz artificial si fuera necesario…
Si las condiciones lo permiten, la técnica de exposición a la derecha (ETTR - expose to the right), también conocida como ‘derecheo del histograma’, se basaría en esta premisa de intentar conseguir que cada celda reciba la máxima cantidad de luz posible.
Usando esa técnica se consigue una ‘imagen’ RAW sobreexpuesta (sin llegar a saturación) y luego en la fase de revelado RAW se ajusta la exposición a su valor correcto.
La imagen final tendrá una SNR mayor que la imagen equivalente usando una exposición normal en cámara o si hacemos una subexposición en cámara.
Pero ten en cuenta que en la mayoría de los casos la diferencia será inapreciable y se corre el riesgo de quemar las luces (celdas que llegan a saturación).
Cómo reducir el ruido térmico en la celda (dark current)
Una forma de reducir este tipo de ruido sería intentar usar el sensor en condiciones de temperatura lo más bajas que sea posible.
Muchos sensores especializados en fotografía astronómica incluyen algún tipo de sistema de enfriamiento.
El tiempo de exposición afecta tanto a la señal como al ruido acumulado, por lo tanto a efectos de SNR no sería tan relevante.
Sin embargo hay que tener en cuenta que puede afectar de forma indirecta si se produce un calentamiento del sensor debido a la larga exposición.
El ruido térmico siempre suma electrones, nunca ‘resta’ electrones del depósito de la celda. Su media no es nula.
Esto se puede aprovechar en la fase de procesado de la información del sensor.
Si conseguimos averiguar cuál es el valor medio (número medio de electrones acumulados por dark current) podemos restarlos de los valores RAW recogidos por el sensor.
Hay que tener en cuenta que esa media es diferente para cada situación: temperatura del sensor, tiempo de exposición, ISO…
Por lo tanto no es un valor fijo conocido que se pueda aplicar siempre.
En fotografía astronómica se utilizan los ficheros Dark (dark frames, dark files) que se generan haciendo fotos con los mismos parámetros que los de la imagen real pero en total oscuridad.
Los sistemas de reducción de ruido de las cámaras, por ejemplo los que se usan al hacer larga exposición, se basan en esta técnica.
Estas técnicas no eliminan el ruido, simplemente lo reducen.
¿Cómo reducir el ruido de lectura?
El ruido de lectura se ha ido bajando progresivamente a medida que se ha mejorado tecnológicamente la electrónica interna de los sensores.
En un sensor CMOS cada celda tiene asociada una electrónica muy compleja: la parte fotosensible, el depósito de almacenamiento, el bloque de ganancia y el conversor ADC, además de las líneas de control.
La electrónica está limitada por cuestiones de espacio, pero cada vez se han ido diseñando sensores con electrónica más compleja (que permite un mejor comportamiento en ruido). Por lo tanto la evolución tecnológica influye en este tipo de ruido.
El ruido de lectura depende de la temperatura del sensor. Una estrategia sería intentar bajar la temperatura (refrigeración) o usar el sensor en condiciones de baja temperatura.
Subir ISO no disminuye el ruido de lectura en valor absoluto, pero sí aumenta la relación señal a ruido (con respecto a esta fuente de ruido en particular).
Recuerda que subir ISO es menos eficiente que aumentar el tiempo de exposición. Subir ISO para mejorar la SNR sólo es efectivo en situaciones muy concretas en las que no podemos subir el tiempo de exposición.
Más información:
La serie sobre el funcionamiento de los sensores de imagen:
-
Dos cámaras diferentes con los mismos parámetros de exposición, ¿generan la misma imagen?
-
¿Qué diferencia o margen hay entre sensores de diferente tamaño?
-
Ruido, ISO y características del sensor de una cámara (versión más simple y fácil de entender)
Fuentes de referencia:
INF5442: Image Sensor Circuits and Systems, Soman Cheng, Johannes Sølhusvik
Photographic Noise Performance Measures Based on RAW Files Analysis of Consumer Cameras, Jorge Igual | Electronics (MDPI) |
Low-noise CMOS image sensors for radio-molecular imaging, Yue CHEN (Thesis / Technische Universiteit Delft)
Leveraging Dynamic Response Pixel Technology to Optimize Inter-scene Dynamic Range, An Aptina TM Technology White Paper
A 2 e- Noise 1.3 Megapixel CMOS Sensor, Alex Krymski, Nail Khaliullin, Howard Rhodes | Micron Imaging
Deep Sky Astrophotography With CMOS Cameras by Dr Robin Glover, (AstroFarsography youtube channel)